

eric69
-
Compteur de contenus
33 -
Inscription
-
Dernière visite
eric69's Achievements
")
-
Merci JossAlf, J'avais déjà essayé de des-inclure ce module, mais il ne réagissait pas ! Après pas mal d’essais, j'ai mesuré l'alim du module (une petite alim 20Volts récupérée sur je ne sais plus quel engin) et il y avait 1,2 Volts ??? J'ai d'abord cru que mon alim avait rendu l’âme... mais non, c'était ma prise 240V qui est devenue défectueuse. Je ne comprends pas ce qui c'est passé, mais en changeant de prise, et en faisant exclure/inclure le module est réapparu normalement. Donc, si ça vous arrive, sachez que le module et tous ses sous-modules restent affichés dans l'interface.... mais que rien ne bouge jamais ! Si c'est une détection de porte, comme moi, on s'en rend compte rapidement, mais si c'est une détection de mouvement, ça risque de passer inaperçu ! Si ça peut aider quelqu'un ...
-
Bonjour, Je viens de constater que j'ai un problème avec un module universel FGBS 321. Ce module me sert à détecter l'ouverture de mon portail. De plus, j'ai mis 4 sondes de température dessus. Tout a toujours bien fonctionné jusqu'à maintenant. Même aprés une mise à jour de la HC2 à la version 4.042 (après beaucoup d'hésitations...) Mais cela fait 2 ou 3 jours que j'ai remarqué que la détection de mon portail ne se faisait plus. J'ai essayé de faire changer les températures des capteurs en les tenant dans ma main, mais rien n'a bougé après 10 minutes. J'ai donc débranché le module pour le réinitialiser. Mais, même débranché, le module apparait toujours dans ma config avec les températures figées ... J'ai rebooté ma HC2, vidé le cache de mon navigateur, mais rien n'y fait ! Dans l'onglet "Configuration/Réseau Z-Wave", il y a plusieurs options. - Configurer de nouveau tous les peripheriques - Réinitialiser le réseau Z-Wave - Mesh network reconfiguration Pouvez-vous me dire ce que font réellement ces options ? Laquelle est sans danger pour la configuration ? Je ne voudrais pas avoir à tout reconfigurer en faisant une fausse manip. Merci de votre aide.
-
@ atalata, Je ne sais pas si la calibration une fois faite, on peut enlever les fins de course. Je n'ai pas fait l'essai. Mais ça me parait dangereux, car d'après ce que j'ai compris, la cal ne sert qu'à mettre le volet dans les positions intermédiaires (10%, 20%, 50%, etc ...) Le module doit appliquer un temps en fonction de la durée de montée ou de descente. La fin de l'alimentation des moteurs se fait par le fin de course, et peut-être aussi après un certain temps, si aucun fin de course n'est détecté, mais je n'en suis pas si sur, et je n'ai pas envie de faire chauffer les moteurs. Il me semble que lors de mes essais (sans interrupteurs), le moteur forçait pendant un bon moment. J'ai même du ré-initialiser le volet plusieurs fois (en coupant le courant 10 mn), car il se mettait en sécurité au bout d'un moment. En tout cas, ma solution fonctionne sans problèmes depuis juin dernier.
-
Bon, je me réponds à moi-même, Après avoir ramé pendant un bon bout de temps, j'ai enfin trouvé une solution qui fonctionne !!! Si ça peut aider les gens comme moi qui ne s'y connaissent pas vraiment en programmation... En fait, je n’étais pas très loin de la vérité: C'était juste un problème de syntaxe avec la commande "curl" lancée sur le Raspberry. - Pour piloter un module, il faut exécuter cette commande depuis n'importe quel système tournant sous Linux et se trouvant sur le même réseau que la HC2: wget http://admin:password@192.168.xxx.xxx/api/callAction?deviceID=8\&name=turnOn (ou turnOff) - Pour modifier une variable existante (ici: "jour-rouge"), il faut exécuter cette commande: curl -X PUT http://admin:password@192.168.xxx.xxx/api/globalVariables/jour_rouge -d'{"value":"1"}' Il fallait "juste" mettre les paramètres au bon endroit Il ne me reste plus qu'à peaufiner le programme qui va me gérer mon chauffage en fonction du tarif EDF ...
-
Merci Krikroff !!! En ce qui concerne la commande pour allumer ou éteindre un module: ça marche ! Mais j'ai toujours du mal à modifier une variable depuis mon Raspberry. En utilisant la page que tu m'indiques, on peut tester directement la modification de la variable, et là , ça marche !!! C'est quand je veux passer la commande depuis le Raspberry que je n'y arrive pas. En fait, j'ai un abonnement "Tempo" avec EDF, et je voudrais gérer mon chauffe-eau et mon chauffage électrique en fonction de la couleur (donc de la tarification) des jours. Je récupère les infos avec le Rapberry, et je voudrais mettre les variables "jour_bleu", "jour_blanc" et "jour_rouge" sur la box Fibaro pour gérer les modules qui commandent mon chauffage. Pour passer la variable "jour_rouge" à 1 , j'utilise la commande suivante: curl -X PUT -d '{"name":"jour_rouge","value":"1"}' http://admin:password@192.168.1.114/api/globalVariables mais j'obtiens le message d'erreur suivant: {"type":"ERROR","reason":"name","message":"No variable name in uri"} Je dois me planter dans la syntaxe, oublier une accolade ou un guillemet... Une idée ??? Merci d'avance
-
Personne pour m'aider ??? Personne ne modifie de variable en utilisant l'API ? NB: je viens de passer à la version 4.033 ... c'est toujours pareil !
-
Bonjour, Je viens de passer à la version 4.032 sur ma HC2. J'ai plusieurs problèmes avec cette nouvelle version quand j'utilise l’Api: J'ai une Raspberry PI avec une clé 3G, et je m'en servais pour pouvoir allumer une lampe (ou piloter un module) en envoyant un SMS à la Raspberry. Je suis débutant, mais j'avais réussi à faire ce que je voulais en utilisant la commande suivante directement dans l'explorateur: X://admin:password@192.168.xxx.xxx/api/callAction?deviceID=8\&name=turnOn J'ai ensuite utilisé cette commande dans un fichier "bash" exécuté par le PI dès réception d'un SMS (après traitement du contenu du SMS): wget X://admin:password@192.168.xxx.xxx/api/callAction?deviceID=8\&name=turnOn Note: J'ai remplacé le "http" par X car ça cachait une partie de la commande en la transformant en lien. Je ne sais pas si tout cela est très correct du point de vue des gourous en programmation , mais ça fonctionnait bien jusqu'à ce que je passe à la 4.032. Maintenant, la même commande ne fait plus rien. Si je la teste directement dans un explorateur, j'obtiens le message suivant: {"type":"ERROR","reason":"WRONG_TYPE","message":"deviceID: expected unsigned int"} J'ai vérifié l'ID de mon module de test: c'est toujours "8"... Que faut-il changer à cette commande pour obtenir le résultat d'avant ? De plus, toujours en utilisant mon Raspberry, je souhaiterais modifier la valeur d'une variable globale crée sur la HC2. Dans mon fichier ".sh" et aussi directement dans l'explorateur, j'ai essayé ces commandes, mais sans aucun résultat (et pas de message d'erreur non plus...) - X://admin:password@192.168.xxx.xxx/api/globalVariables/mavariable curl -X PUT -d '{"name":"mavariable","value":"1"}' - X://admin:password@192.168.xxx.xxx/api/globalVariables/mavariable curl -X POST -d '{"name":"mavariable","value":"1"}' Note: J'ai remplacé le "http" par X . Quelle commande dois-je passer pour modifier "mavariable" ? Merci de votre aide. Eric
-
Merci Steven !!!! à‡a fonctionne exactement comme je voulais. J'ai pourtant cherché un bon moment avant d'oser poser la question Il faut dire que la doc Fibaro ... c'est pas ça ! Heureusement qu'il y a des Dieux de la Domotique sur ce forum...
-
Bonjour, Aujourd'hui, j'ai installé mon premier module Dimmer Fibaro (FGD 211). J'ai utilisé le schéma standard (avec neutre dispo), à savoir un interrupteur monostable (bouton poussoir) connecté entre Sx et S1. Jusqu'ici, tout va bien. Je voudrais aller un peu plus loin, en connectant un 2eme poussoir entre Sx et S2. Je vois dans la doc que l'on peut déclencher une scène différente suivant que l'on fait un simple, double ou triple clic sur ce poussoir: Interrupteur mono stable / interrupteur pour volet Entrée S1: tenir appuyé ID12 (option inactive dans le cas d'un volet) relâcher ID13 double clic ID14 (dépend du paramètre 15 - valeur 1 = double clic actif) triple clic ID15 clic simple ID16 Entrée S2: tenir appuyé ID22 (option inactive dans le cas d'un volet) relâcher ID23 double clic ID24 (dépend du paramètre 15 - valeur 1 = double clic actif) triple clic ID25 clic simple ID26 Je dois dire que c'est très flou pour moi. J'ai validé le paramètre 41 (activation de scène), et je pensais que si je faisais un double clic sur le 2eme poussoir par exemple, la scène qui a l'ID24 se lance, et la scène avec l'ID25 en cas de triple clic ....etc Mais voilà , je ne sais pas comment attribuer un numéro d'ID à une scène ? Est-ce que quelqu'un pourrait m'expliquer comment faire ? Merci d'avance
-
@ stéphane: Effectivement, avec 10 volets roulants, ma méthode risque d’être galère ... et pas très pratique. Mais à l'origine, je ne prévoyais pas de mettre les contacts fin de course. Ce n'est que parce que le module fibaro ne détecte pas quand mon volet arrive en butée que j'en suis arrivé là . (D'ailleurs, si un spécialiste des moteurs pouvait m'en dire plus là dessus...je suis preneur). Pour ce qui est de mettre une commande en sortie de disjoncteur,je suis un peu de l'avis de Nico, je pense que tes volets ne vont pas aimer les coupures et remises en route permanentes. Une autre solution est de changer complétement le moteur de tes volets: En fouillant sur internet, j'ai aussi trouvé ceci: http://www.motorisationplus.com/motorisation-volet-roulant-ematronic-em35s-1017.html?LGWCODE=EM35S1017;12208;292&utm_source=Comparateurs&utm_term=EM-35S10/17&utm_medium=Google-shopping&utm_campaign=cpc&gclid=CLi90uDkp8ACFc7HtAodygQAHg à‡a revient à environ 100€ par volet (60€ le module Fibaro + 34€ le moteur avec butées mécaniques) C'est quand même un budget, mais avec ça, pas besoin de mettre des fins de course, et le module Fibaro gérera les ouvertures partielles ...
-

Topic unique Fibaro FGBS-321 Module Universel
eric69 a répondu à un(e) sujet de Moicphil dans Modules Fibaro
Bonjour à tous, Je viens d'installer un FGBS-001 avec 2 sondes de temp et une detection d'ouverture pour mon portail. Ca fonctionne bien, mais je me pose une question: Que veux dire le "Non configuré" figurant sous chaque icone ? J'ai essayé plusieurs paramètres en sauvegardant à chaque fois, mais ce commentaire est toujours là . -
Bonsoir Snooppy, Désolé pour la réponse tardive, je viens de rentrer de vacances .... J'en suis au même point pour la domotisation de mon volet, à savoir que j'ai toujours les 2 contacts "fin de course" pour détecter les butées hautes et basses. Par contre, je n'était pas satisfait pour la détection de butée basse, comme expliqué précédemment, car en plaçant le contact en bas du volet, premièrement le contact était accessible et visible (pas très beau), et d'autre part, les lames n'étaient pas complétement fermées et le volet pas sécurisé en position fermée. J'ai donc positionné ce contact dans le coffre du volet de manière à ce qu'il se déclenche quand le volet est vraiment fermé. J'ai mis un fin de course avec un contact NO (normalement ouvert) qui est actionné en permanence car il frotte sur les lames du volet, et qui s'ouvre quand il ne touche plus les lames et donc que le volet est complétement baissé. Par opposition le contact de butée haute est un NF (normalement fermé) qui est déclenché et s'ouvre quand le volet arrive en position haute. Le schéma de câblage est le même que celui que j'ai mis dans le commentaire précédent. Les contacts fin de course doivent supporter une coupure de tension de 240Volts. J'ai mis des contacts de ce type: http://www.ebay.fr/itm/Nouveau-Micro-levier-a-galet-Normalement-ouvert-Fin-de-course-fermeture-KW12-3-/161051186963?pt=FR J'ai utilisé le contact NO pour la butée basse et le NF pour la haute. Par contre, j'ai du faire face à un problème: Lors de la descente du volet, comme le levier qui actionne le contact frotte contre les lames, il arrivait que le contact déclenche alors que le volet n'était pas complétement en bas. Ceci était du au rayon des lames qui change au fur et à mesure que les lames s'enroulent. J'ai donc du fabriquer un support pour le contact monté sur un ressort, afin de suivre la courbure des lames. J'ai bricolé ça avec un bout de tôle et un ressort de récupération. Je sais: ce n'est pas facile à comprendre (et encore moins à expliquer) sans le voir réellement. Dès que j'ai un moment, et si tu en as besoin, je démonterais le cache de mon volet pour prendre une photo du montage que j'ai fait. Depuis que j'ai fait ce montage (environ 1 mois), ça fonctionne correctement. La calibration s'est bien passée et je commande mon volet parfaitement, avec gestion des ouvertures partielles. J'ai bien sur câblé 2 interrupteurs sur le montant du volet pour le commander manuellement. Si tu as besoin de plus d'infos, n'hésite pas. A bientôt, Eric.
-
Bonjour Lazer, Si j'ai bien compris, la detection fin de course se fait toute seule dans le Velux ? Il suffit d'alimenter le moteur en 24V et une fois arrivé en butée, le moteur s'arrête? Dans ce cas, comment s'arrete le module FGRM ? Tu as programmé un arrêt après un certain temps ? Je vais m'attaquer à mes Velux un de ces jours, et ton expérience est la bienvenue... Merci
-
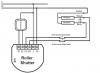
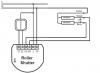
Bonjour à tous, Ca y est ! Je me suis lancé dans la "zwave-isation" du volet roulant de ma baie vitrée de marque Bubendorf. J'ai déjà 3 autres volets de marque Somfy, avec butées mécaniques, et cela n'a posé aucun problème avec les modules Fibaro FGRM-222. Comme ces modules sont censés gérer les butées électroniques, je me suis dit pourquoi ne pas essayer sur le Bubendorf ? J'avais dans un premier temps soudé des fils en parallèle des boutons poussoirs sur la télécommande, et je pilotais tout ça avec un module et une télécommande Chacon. Ca marche, mais c'est loin d'être satisfaisant: - Pas de retour d'état. - Fiabilité faible. - Pas de gestion du pourcentage d'ouverture du volet. - Difficilement intégrable aux scènes de la HC2. Je crois qu'il existe différents modèles de volets (donc peut-être de type de commande) chez Bubendorf. Voici le modèle de ma télécommande RF: (on aperçoit le connecteur avec les fils soudés en parallèle des contacts) Allez, je me lance: Je démonte tout ! ATTENTION: Prévoyez d'y passer du temps. Il y a pas mal de boulot ! Je vous passe la séquence démontage, cela doit être différent en fonction de la fenêtre et du caisson que vous avez chez vous. Chez moi, il a fallu que j'enlève le cache, et que je démonte les 2 rails dans lesquels coulissent les lames du volet pour pouvoir tout sortir. Il vaut mieux être deux, sinon ça risque d'être galère. Apres démontage, voici ce qu'on peut lire sur la plaque du volet: Il faut démonter cette plaque noire, et derrière, on trouve le circuit imprimé de toute l'électronique de réception RF et de commande du moteur ainsi qu'une capacité. Le connecteur avec 3 fils (1 jaune, 1 rouge et un noir) est la connexion au moteur. L'autre connecteur (avec les 2 fils blancs) est relié à la capacité. Je teste les fils à l'ohmmètre pour savoir à quel type de moteur on a affaire: Entre le fil jaune et le rouge on a 205 Ohms. Entre le fil jaune et le noir on a 205 Ohms. Entre le fil noir et le rouge on a 410 Ohms. J'en déduis que c'est un moteur monophasé avec 2 enroulements identiques. Ce genre de moteur s'alimente de la façon suivante: On mets une Capacité entre les 2 bobinages, on branche le neutre sur le fil commun (jaune dans notre cas). Si on applique la phase sur le fil rouge, la bobine correspondante est alimentée directement, et la bobine du fil noir est alimentée à travers la capacité qui génère un déphasage. Ceci crée un champ tournant qui fait tourner le moteur dans un sens. Si on mets la phase sur le noir, le champ tournant s'inverse et le sens de rotation également. Super !!! Ca correspond au possibilités de branchements du module FGRM-222 Ca va donner un câblage de ce type: Comme je veux garder une possibilité de revenir en arrière, je me suis fait une plaque qui se met à la place de celle de Bubendorf, qui ne sert qu'à faire les connexions entre le moteur, la capacité et le module Fibaro en gardant intacts les connecteurs. Comme je ne savais pas au départ à quel fil correspond la montée ou descente sur le moteur, j'ai connecté au hasard (une chance sur deux), et j'ai eu de la chance. Par contre, je n'ai pas repéré les fils du moteur , et je ne sais plus lequel fait quoi :-( Désolé, mais si vous faites le montage, il faudra faire un essai avant de tout remonter. Après remontage de l'ensemble, je teste (j'ai inclus le module sur ma Box avant de le connecter dans le volet): J'ai bien sur configuré le module avec les paramètres suivants: - appareil commandé = Blind with positioning inactive (ce qui, pour moi, correspond à une détection électronique) - switch type = Momentary switches Un appui sur le bouton "descente" ... ça descend ! Un appui sur le bouton "montée" ... ça monte ! C'est après que les choses se gâtent... J'essaye de lancer une calibration: Le volet descend jusqu'à la butée ... et continue de forcer. Pareil sur la montée. Essai avec le paramètre appareil commandé = Blind with positioning active : Pareil J'ai passé les heures suivantes à faire des essais en jouant avec les paramètres de détection de puissance et de durée de fonctionnement, mais impossible d'arriver à faire arrêter le moteur en butée haute ou basse. A force de faire forcer le moteur, il est arrivé qu'il n'a plus bougé du tout. Le module fonctionnait normalement, car lorsqu'il était actionné, les LED verte et rouge s'allumaient bien en fonction de l'ordre envoyé: montée ou descente. J'ai tout débranché pendant 15/20 minutes, et tout a remarché quand j'ai rebranché. J'en déduis qu'il y a une protection thermique sur le moteur du volet. Après m'être arraché presque tous les cheveux, J'ai fini par alimenter mon volet à partir d'une rallonge, de façon à brancher un Wattmètre sur l'ensemble. Mesures en descente ou montée sans forcer: 0.8 Ampères, 190 Watts. Mesures en butée haute ou basse : 0.8 Ampères, 190 Watts. ???? La consommation est exactement la même que le moteur force ou pas !??? C'est donc normal que le module Fibaro ne puisse pas faire la différence et arrêter le moteur en butée ! à‡a ne m'arrange pas du tout ça... Après tout le temps passé, je n'ai pas envie de renoncer tout de suite. Je décide d'essayer de mettre provisoirement des contacts de fin de course pour détecter les butées hautes et basses. Voici la haute: Avec le branchement suivant: Je remets le paramètre appareil commandé = Blind with positioning active. Je lance une Calibration: le volet descend, actionne le fin de course bas, remonte, arrive au fin de course haut et s'arrête. Tout s'est bien passé ! Tous les essais suivants de positionnement intermédiaires, ouvertures, fermetures, fonctionnent aussi. J'ai donc ce que je voulais, mais je suis quand même un peu insatisfait. Je pensais que la détection électronique des modules FGRM-222 allait faire l'affaire. D'après mes souvenirs (lointains), un moteur qui force se rapproche d'un court-circuit, ce qui fait un appel de courant plus important et donc une détection possible. D'ailleurs, tous vos commentaires sont les bienvenus, surtout si vous vous y connaissez en moteurs :-)) Les fin de course font un peu "usine à gaz". De plus, pour détecter la position basse, il va falloir que je trouve un autre moyen qu'un contact placé en bas du volet: en effet, le volet s'arrête dès qu'il touche le contact, ce qui fait que le volet n'est pas fermé complètement. Les lames ne sont pas serrées et il reste un jour entre elles. On peut soulever le volet de quelques centimètres... pas bon pour la sécurité. Si je reste avec cette solution, il va falloir que je trouve un moyen de détecter cette position directement dans le caisson du volet... j'y travaille !







-
Merci Krikroff, ça marche du tonnerre !!!








